
每日心情是汇编和组成原理知识都还给老师了 🤡
由于矩阵乘的具体实现基本上是大量的乘加运算,在没有高性能的矩阵乘计算库之前,落到高级语言上还得用嵌套循环来实现,因此矩阵乘对计算资源的消耗是很大的。除了计算机体系结构的不断更新外,软件优化方面对此也有大量的研究工作。一般来说的工作是:
- 结合实际场景,计算出性能最高的指令排布方式,然后手写这部分乘加计算的汇编
- 编译优化,在编译器层级完成自动并行化、循环优化等工作,加速计算
- 开发相关的高性能计算库(如 OpenBLAS 等),让用户直接调用一些常见规模的矩阵乘法,落到具体实现的话本质上也是手写汇编
讨论通用矩阵乘(General Matrix Multiplication,GEMM)的优化,实际上就是讨论如何设计一组针对给定规模和场景(稀疏 or 稠密,是否三角等)矩阵乘的高性能计算指令。
基于算法分析的优化
根据矩阵乘法的计算特性,可以从数学的角度做优化。
矩阵乘法的计算复杂性
在理论计算机科学中,矩阵乘法的计算复杂性决定了矩阵乘法的运算速度。最朴素的办法当然是使用三层循环,复杂度为 .一些数学方法的使用让它的计算复杂度得以下降,目前最好的方法可以达到 。最经典的优化算法是 Strassen 矩阵分块算法,其基于分治的优化思想非常具有启发性。
Strassen 算法
关键是引入中间矩阵,用 11 次额外的加减运算代替了一次乘法运算。
对于朴素的分块,我们知道矩阵运算可以简化成以下形式:
然而这种计算并没有在本质上减少乘法运算的规模。因此,Strassen 算法引入了以下的中间矩阵,使得计算最终简化为 7 次乘法:
此处还可以进行一些优化,减少矩阵加法的次数。可以使用 Winograd 发现的如下形式优化算法:
其中,
基于体系结构的通用优化
也叫软件优化方法,是结合具体计算的特性(例如矩阵的规模)和计算机体系结构的特征,设计出的针对性优化方法,基本思路是数据分块和在多级存储上进行高效的数据搬运 —— 这其实是 HPC 优化的重要思想,也就是:
- 如何改善访存局部性,让数据放在 更近 的存储上掩盖计算的延时,从而减少内存墙的影响
- 如何利用硬件的并行特性,高效执行计算
how-to-optimize-gemm 介绍了如何采用各种优化方法,将最基础的计算改进了约七倍。其基本方法是将输出划分为若干个子块,以提高对输入数据的重用。总计而言,采用的是以下几种通用的优化思路:
- 大量使用寄存器,减少访存
- 向量化访存和计算
- 重新组织内存以使得地址连续
更细节的调优方法就与具体的硬件架构相关了。
分块原理:使用寄存器减少访存
分块的基本动机是,既然每次迭代都需要重复存取数据,那么在 一次迭代 中计算目标矩阵的一个 Block 而不是某个元素就明显可以 复用 一部分数据(对于这些可复用的数据,处理策略是存储在寄存器中,减少访存次数),进而避免一些冗余的存取操作。这种策略也被称为 寄存器分块 (与之对应的一个概念是 cache 分块 ,比较复杂,后面再说)。
例如,对以下这种情况,假如一次迭代可以计算一个 1 x 4 的 Block 而不是一个元素,那么在那一次迭代内,读取到的矩阵 A 的第二行元素就可以复用。
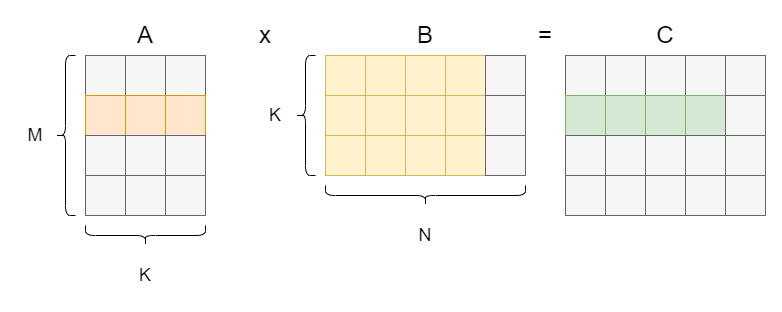
这段计算表示成伪代码可以写成(感觉伪代码形式更好理解):
1 | for (int m = 0; m < M; m++) { |
一般我们把最内层的循环称为 计算核 (micro kernel)。
显然,对 B 也可以实现访存的复用:
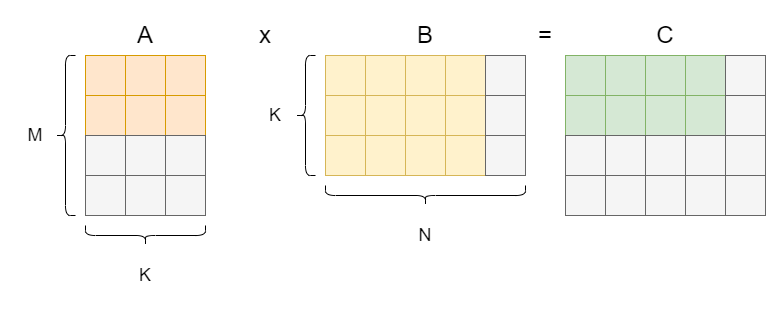
此时的情形表述为伪代码:
1 | for (int m = 0; m < M; m += 2) { |
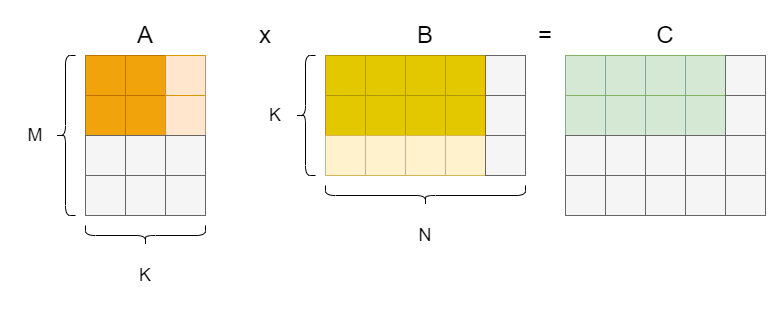
具体到 GPU 的执行中,在分块后是先将 A 和 B 中参与当前迭代运算的小矩阵(图中橘色和黄色的部分)取到 shared memory 中,之后各个线程再将 shared memory 中的数据存入寄存器中进行计算。设 A 中小矩阵的规模为 ,B 中小矩阵的规模为 ,且此时一个 block(图中绿色部分)中每一个线程负责一个元素的计算,这就说明一个 block 需要对 shared memory 进行 次读操作,从 shared memory 中取数的时延还是不可忽视的。此时,我们进一步考虑对 shared memory 进行分块。
通过上面两个样例,我们可以看到对 M 层循环和 N 层循环,通过修改迭代的步进长度来展开循环后,都可以得到一定程度的数据复用改进(具体而言,步长变为 时可以减小访存次数到原来的 倍)。目前为止,这个改进都是针对输出的两个维度做的,对于最后一层,也就是中间那个维度 K (被称为削减维度,Reduction),实际上也可以尝试做展开,实现更激进的访存复用:
表述成伪代码如下:
1 | for (int m = 0; m < M; m += 2) { |
鉴于现代处理器出色的 SIMD 能力,实际上可以采用的分块策略可以比示例更加激进。此处还可以做一个 避免乘法 的优化,也即保存指针,使用指针偏移完成形如 …[n + 0], …[n + 1] 的工作。
而显然,我们可以看到图中举的例子是 不对齐 的,这样的 Block 策略显然不是最优的数据复用策略。实际应用中应当考虑矩阵乘的规模和具体的体系结构,采取合适的 Block 规模设计(最终目标是提升计算访存比)。不同的分块大小在不同 shape 的矩阵乘法应用上性能各有优劣。
此处可以参考 旷视 的博客。
寄存器重映射
考虑上一节中最后一个优化,由于每一个线程(一个线程处理一轮迭代)都使用了相当规模的寄存器,此时我们不得不考虑寄存器之间的 bank conflict 问题。或者说,所有计算密集型的算子都需要考虑这个问题。
寄存器的 bank conflict 是指在并行计算中,多个线程同时访问同一个寄存器 bank 时发生的冲突。在现代处理器中,寄存器被组织成了多个 bank ,每个 bank 可以同时访问不同的寄存器。然而,如果多个线程同时访问同一个 bank 中的不同寄存器,就会发生 bank conflict 。如果一条指令的的源寄存器有 2 个以上都来自同一个 bank ,产生了 bank conflict,指令就会重发射,浪费掉一个时钟周期。
为了避免寄存器的 bank conflict ,可以通过重新安排寄存器的分配方式来减少冲突,这个策略称为寄存器重映射。
数据预取 prefetch:掩盖访存延迟
其实很好理解,就是排指令计算的软流水的时候,可以 “重叠” 一部分操作,让一部分取数据操作放在上一部分的计算操作中同时进行,避免在单次迭代中出现计算单元因取数而停下来等待的延迟行为。
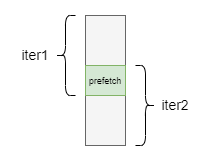
具体而言,当 Block 进行第 k 轮迭代时,需要对小矩阵 和 进行计算,此时我们提前将 和 取到 shared memory 中,这样进行第 k + 1 轮迭代的时候,计算单元就无需等待将该轮次迭代需要的小矩阵从 global memory 搬运过来的时间了。对于寄存器,也可以采取 prefetch 策略进行优化。
向量化与内存组织重排
对于带有 SIMD 支持的处理器,访存和计算都可以向量化(提供了向量寄存器),此时可以利用向量特性提高计算性能。具体而言,需要对之前朴素分块计算中的指令进行 重排 ,使得对 A、B 和 C 矩阵的 访存连续 ,然后将对应的访存和计算向量化,如下图所示(图例是行优先存储的)。
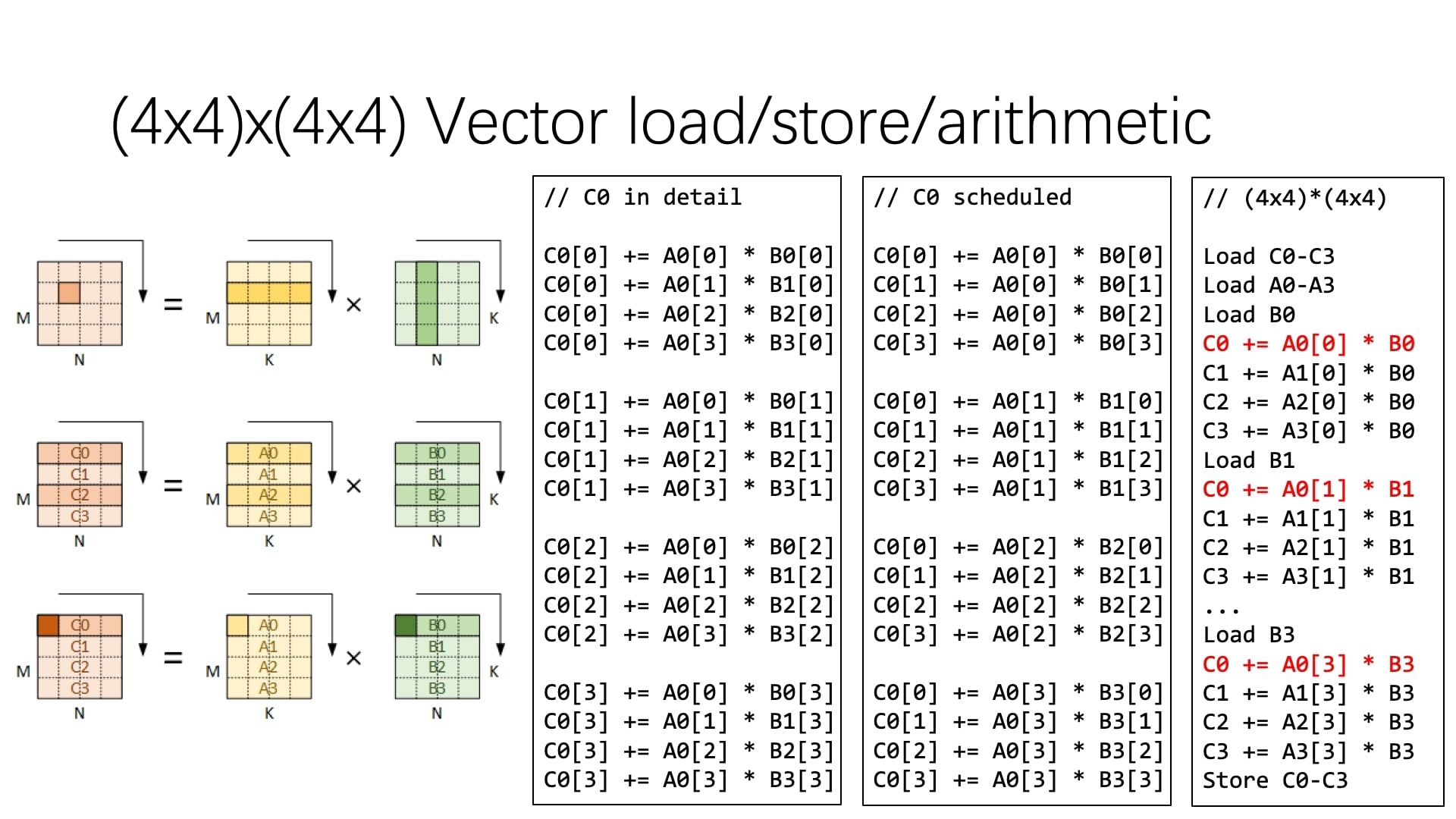
只不过要注意的是,向量化内存加载必须讨论的问题是访存连续性 —— 如果不进行重排,向量化内存加载时会频繁发生高速缓存缺失(cache miss)现象,浪费很多时钟周期。
TODO:
- GotoGEMM 论文:Anatomy of High-Performance Matrix
Multiplication - OpenBLAS GEMM 优化