
实在想吐槽一下,最近的调研实在是太难了,有效资源特别少,同时悲哀地感受到了自己的洋文水平正在急速退步……对不起 Prof Xiaodou。
有很多地方把 GCM 译作“全局代码提升”,我也就套用这个译名了,其实它的行为更接近于“提取”。首先,我们需要解释一下这个优化算法的动机。
随意地给出如下的一段代码作为例子:
1 | public static int foo(int val) { |
然后,我们可以直接地解析出如下图所示的 IR(有点像 ANTLR 解析出的抽象语法树,不过它其实是一般的前端方法都能解析出的 IR 结点图,是一个非常 raw 的状态)。
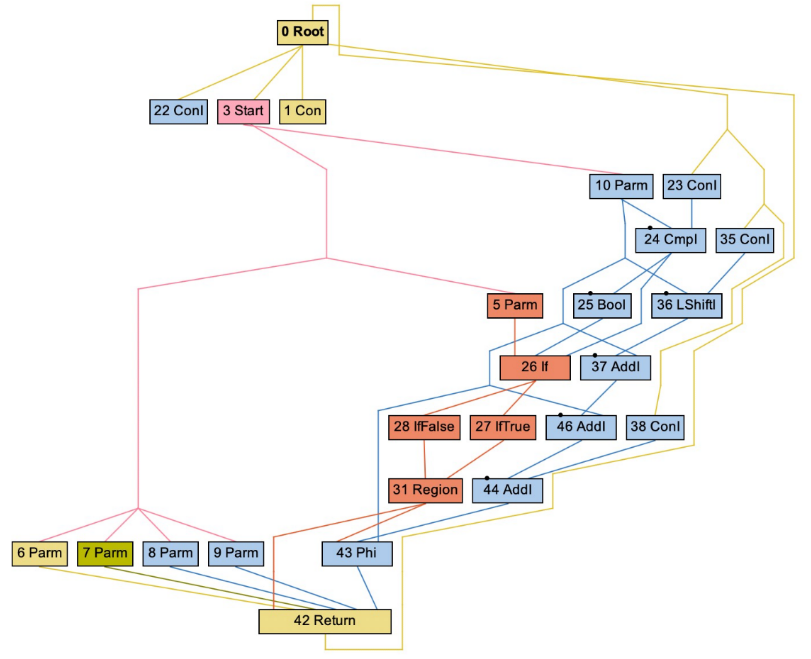
这种 IR 结点图被称为 Ideal Graph,或者“sea of node”,因为这些结点就如漂浮在海洋中一样杂乱,对于大多数指令结点,它们现在处于的基本块都是由源程序直译出来的,现在它们的控制依赖关系体现出来的控制流图结构并不是最佳的,甚至因为前面执行过的某些优化(比如全局值编号)可能还是错的。我们需要一种方式,将结点的海洋重建成我们需要的 CFG,它应当是正确的(体现在基本块中的每个指令的每个操作数都能够支配当前基本块),同时是高效的(体现在每个指令所位处的循环嵌套深度最浅),这种方法就是全局代码提升。
重建 CFG 的好处倒是显然的,毕竟它是许多优化算法的结构基础。对于我们的编译器,由于前端解析的时候构造过 Module 的基本块结构,因此完成这个结点归位的工作倒不是什么难事。
Cliff Click 给出了一个直接的近线性时间算法来完成全局代码移动 (GCM) ,算法将代码从循环中提取出来,并将其插入更依赖于控制的 (同时,可能执行频率更低) 基本块中。GCM 不是最优的,因为它很有可能会延长一些路径。它会使依赖于控制的代码脱离循环,因此如果循环至少执行一次,那么这种算法就是有利可图的。GCM 只依赖于指令之间的依赖关系(因为是基于支配树的),在执行算法时,原始的调度顺序将被忽略。
GCM 会移动指令,但它不改变控制流图 (CFG) ,也不删除冗余代码。GCM 受益于 CFG 整形(如分离控制相关的边,或插入循环的 landing pads)。GCM 允许我们为全局值编码 (GVN) 使用一种简单的基于哈希的技术,因此 GCM 和 GVN 优化往往是同时进行的。
全局代码提升(Global Code Motion,GCM)
全局代码提升算法的功能是调度那些“浮动”的指令,把它们归位到一个个基本块中,以构建成 CFG。这个过程必须保留已有的控制依赖和数据依赖。在这个大前提下,算法可以自由发挥,我们的目标就是尽可能把代码移动到循环外面,尽可能让代码的执行路径变少。它的执行步骤大致如下所示:
- 根据 Ideal Graph 构建支配树,并用支配树深度来标注基本块。
- 查找循环并计算每个基本块的循环嵌套深度。
- 根据现有的控制和数据依赖关系调度指令,讨论指令能放到的最前的基本块,也就是这些指令最早被它们的输入支配的块。显然,为了寻找一个尽可能早的符合条件的基本块,这个调度方法将会产生很多生命周期非常长的预测代码。
- 讨论指令能放到的最后的块,一般来说是最后一个它们能支配所有自己的 uses 的那个块。
- 在上面两步中得到的最前和最后两个块之间,我们得到一个安全的放置指令的范围。在这个范围内,我们选择处于尽可能浅的循环嵌套深度中、尽可能依赖于控制的块作为最终放置指令的块。
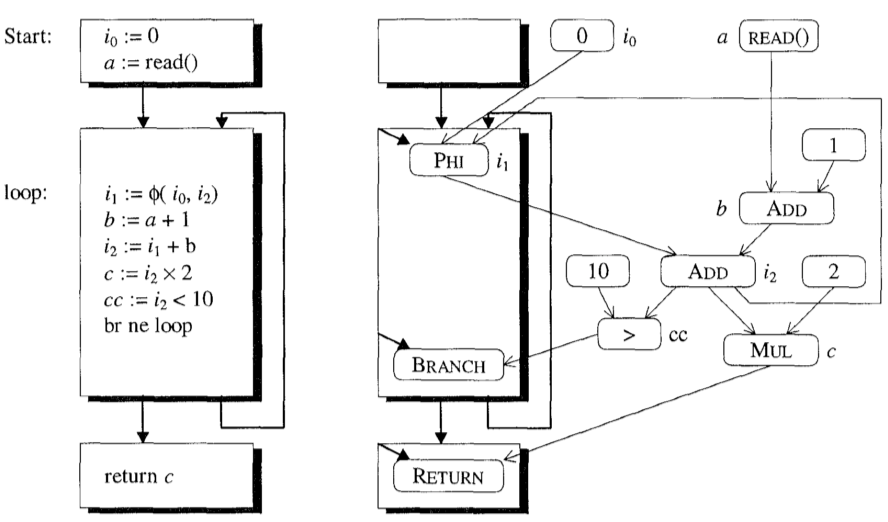
我们将在下面的小节中详细讨论这些步骤,并使用下图中的循环作为示例。左边的代码是原始程序。右边是结果图,阴影框是基本块,圆角框是指令,黑线表示控制流边缘,细线表示数据流(数据依赖)边缘。
根据 Ideal Graph 构建支配树
这里,我们需要使用到经典的 Lengauer & Tarjan 算法,这个算法有接近线性的复杂度,运行时间几乎跟 CFG 的大小成正比,但是不是很容易理解,相比之下,另外一种迭代数据流分析的方法更容易理解,只不过复杂度有 ,几乎现在所有编译方面的书籍都是介绍的这种方法。《Engineering a Compiler》的作者 Cooper 还提出了一种算法,该算法在复杂度以及实现难度上作了很好的折中,并且作者声称该算法在实际的 CFG 上的效果与经典的 Lengauer-Tarjan algorithm 相差并不多,只不过我没有去尝试。
有关支配树构建的内容,这篇博客写得非常详尽,包括理论背景、算法解析等等,可供参考:构造Dominator Tree 以及 Dominator Frontier
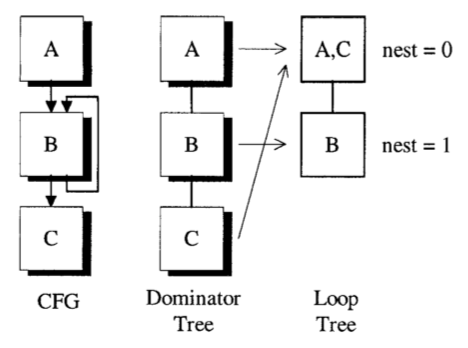
得到支配树后,我们同时得到了循环嵌套深度。这两个信息使我们能够处理基本块的预期执行时间,接下来,我们会使用这些信息来决定在哪里放置指令。根据示例得到的 CFG、支配树和循环树如下图所示,nest 指示的是循环嵌套深度:
讨论最前块
首先要进行的指令调度是讨论指令能够放置的最前的基本程序块,这是一个“贪心”式的思路(greedily),主要的动机是尽量把指令移出循环,并且缩短代码的长度。指令能够放置的最前的块是它们第一个会被自己的输入所支配的块,唯一的例外是由于某些控制依赖被“固定”(pinned)到特定块中的指令,它们包括 phi 指令、branch / jump、stop / return 指令,可以看到都是一些具有结束性质的特定的指令,因此也要放到那种特定的块里(这些块也被 pin 了),比如经典的 ret block。还有一个特殊的点是故障指令(faulting instructions),它们有一个显式的控制输入,因此它们不能被移动到自己位处的原始基本块之前,否则会导致故障的判断出现问题。
这个调度模式将会产生很多预测性质的、生命周期非常长的代码。
具体的算法流程如下所示:
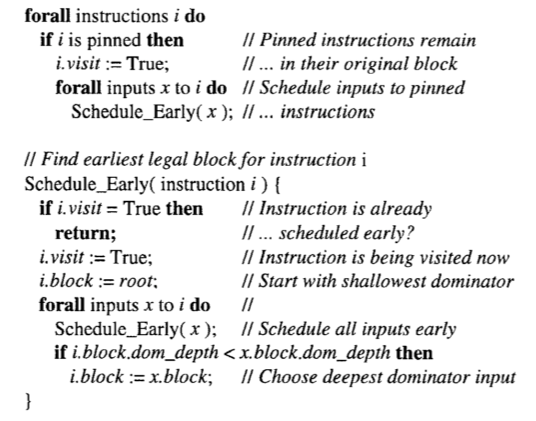
从已经有控制依赖的指令(pinned,后称固定指令)开始,我们对输入做一个后序 DFS。在调度完固定指令的所有输入之后,我们再来调度指令本身。我们将指令放置在与它位处最深的支配树深度输入相同的块中。如果此时所有的输入定义都能支配指令的 uses,那么这个块就是正确的“最前块”。
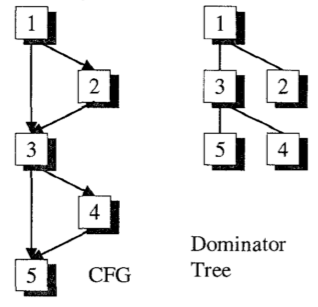
但还有一个问题:我们很容易(或者说,实践中本来就经常出现)就可以写出一个输入并不支配所有 uses 的程序。考虑下面这样一段代码:
1 | int first := TRUE, x, sum0 := 0; [1] |
根据这段代码,可以构造下图中右图这样的支配树,同时,我们在左图给出正确的 CFG:
可以看到,在 block 5 中我们使用了 x,并且在 block 4 中定义它。由于支配树构建算法总是假设所有的执行路径都是可能实现的,因此完全可能在没有定义 x 的时候就使用了 x。对于 [5] 处的 ADD 指令,我们可以找到它的支配树深度最深的输入来自 [4.1] 中对 x 的赋值,如果单纯执行上面的算法,那就有可能会把 ADD 指令添加到 block 4 里去,这显然是错误的(要知道,我们是先得到支配树后,才依此计算 CFG,上图中左图的 CFG 是一个正确结果的展示,实际上在执行这一步时,我们不知道有这样一个 CFG),它错误的根源在于 block 4 并没有支配 block 5。
我们的解决方案是利用 SSA 转换时留下的一些“额外的” phi 指令。为什么它们会被移除呢?是因为在和 GCM 往往一起进行的优化 GVN 中,我们会进行恒等式优化把这种 phi 指令给优化掉,关于它的详细信息可以在有关 GVN 和 LVN 的文章中查看。对于上面的代码,如果使得这些额外的 phi 指令可见,会长成这样:
1 | int first := TRUE, x0 := T, sum0 := 0; [1] |
本质上, 的声明会将其初始化为未定义的值 T。然后,这个值会与赋给 x 的其他值合并,合并需要 phi 指令。这些 phi 指令就支配了 block 5 中 x 的使用,如此,ADD 指令就可以被正确地放置到 block 5 中去了。
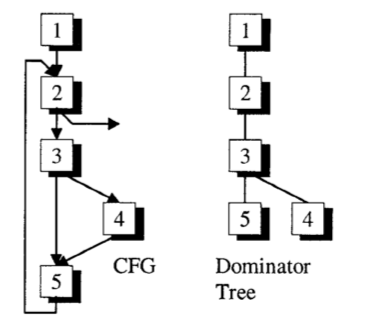
这个问题也会出现在循环之外。我们考虑一段这样的代码:
1 | int x0 := T, z0 := ...; [1] |
它会得到如下的支配树和 CFG:
block 3 处的 phi 指令非常关键。如果我们将其作为额外的 phi 移除,那么本应该在 block 4 中的 f(x) 的计算将被提前调度到 block 2 中。
从这两个例子中我们可以总结出:这些额外的 phi 指令不能被移除,因为它们保存着有关值的可用性的关键信息。在我们实现 GVN 算法的过程中,我们会使用类似 x = phi(x, T) 这样的恒等式优化来移除这种 phi 指令,这种移除事实上是不合适的,我们需要对其进行特判。
讨论最后块
上一步讨论会把代码提升得太多,我们不能够将其作为最终的结果——它得到的代码大部分是预测性质的,生命周期太长。一个经典的现象是它会把所有的常量都提升到程序的开头(原因是计算支配树的时候会把它们提升),或者使得指令使用了还没被定义的变量(比如把 load 指令搞到了使用它的 add 后面)不管它们的第一次使用是在什么地方。因此我们还需要讨论指令能够放置的最后的块。这样一来,在最前块和最后块之间将得到一个合适且合法的范围,以供我们放置指令。
这里需要复习一个图论概念:最近公共祖先(Lowest Common Ancestor, LCA)。我们希望找到支配树中所有指令使用的 LCA。对于每条指令,寻找 LCA 可能需要 的时间,但事实上这个数也挺小的。依旧是从固定指令开始,我们对指令的所有 uses 使用后序 DFS,在访问(并将它们调度到最后块去)了一个指令的所有孩子后,我们再来调度指令本身。在调度之前,我们经过上一步讨论,将指令调度到最前的合法块中,此时它的 uses 的 LCA 就代表了它的最后块。此时,很显然最前块是支配着最后块的(当然,前提是没有移除那些额外的 phi 指令,这个一定要注意),在支配树中有一条从最前到最后块的线,它表示着可以放置指令的安全范围,我们可以把指令放在这条线上的任何块中。那么应该选择哪个块呢?我们选择处于最浅循环嵌套中最近(也就是说最依赖于控制)的位置。
对于大多数指令来说,uses 产生在与指令本身相同的块中。然而,对于 phi 指令显然不是这样,往往可以再往上回溯。
下面给出讨论最后块的算法伪代码:
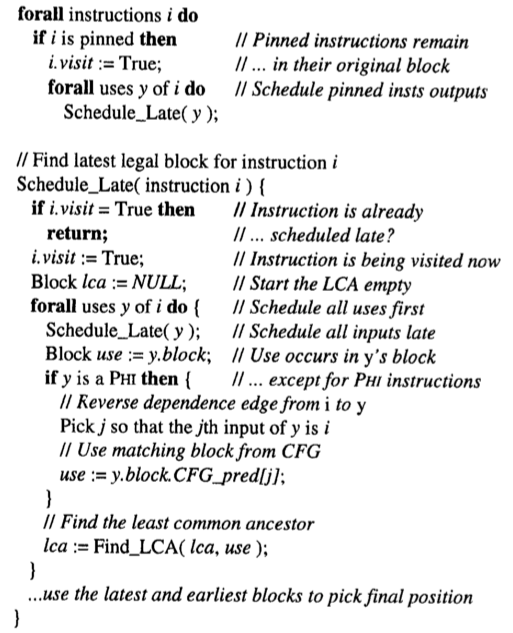
在这个地方,我们需要注意关于 uses 的叙述,虽然比较显然,但笔者一开始也搞糊涂了:第一段中的 uses 指的是 UsedValue,比如 ret %1 中的 %1;而第二段中讨论的 uses 则是指令的 user。因为你想,我们的目的是讨论出指令能放置的最后位置,固定指令的形式注定了它们不会有 user(除了 PHI,不过从伪代码可以看出它被特殊讨论了),因此第一段的循环里讨论的是 usedValue;而对于一个指令,最显然的“最后”位置肯定是使用了它的固定指令前面,但一个指令可能有多个使用者,因此我们讨论所有使用了它的固定指令的公共祖先,作为它的“最后块”计算结果。总结而言就是不要照抄伪代码,要考虑清楚 LLVM 的细节。
其实使用 use 这个叙述多半是有点渊源的。因为在 LLVM 里,Use 是一个关于使用者和被使用者的 Pair,而笔者的项目里并没有为 Use 单独建立数据结构,因此导致了自己一开始的混淆。
笔者的代码大致如下:
1 | for (Instruction instruction : instructionList) { |
有关寻找 LCA 的部分就不赘述了。
选择目标块放置指令
在上一节中,我们已经谈过选择目标块的标准。这里讨论一些额外的问题。当我们为指令选择好最终的位置后,我们可能会影响到其他指令的合法位置,尤其是我们通过代码提升操作把指令提出循环的时候。为了解决这种交互式的影响,我们提出以下的算法:
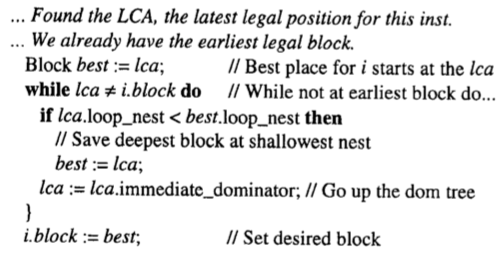
也就是说,在寻找最后块的时候,我们就敲定好指令最终放置的位置。这也是为什么原论文将目标块的选择标准放到了上一节去讨论。
参考:
- Cliff Click, Global Code Motion Global Value Numbering, 1995
- Thomas Lengauer, Robert Endre Tarjan, A Fast Algorithm for Finding Dominators in a Flowgraph, 1979